
简介
陆空两栖机器人是一种能够在陆地和空中自由移动、执行任务的机器人。随着时代的发展和技术的进步,陆空两栖机器人逐渐的展现了它们强大的优势和广阔的发展前景,其能力和性能得到了显著提升。但也由于其欠驱动特性,仍然存在整体费重大、续航时间短、作业角度受限等问题。该作品针对上述传统两栖机器人的痛点问题,我们提出了一种采用六旋翼一面排布的几何固定构型,六自由度独立控制的“陆空两栖、全向可控智能作业机器人”。
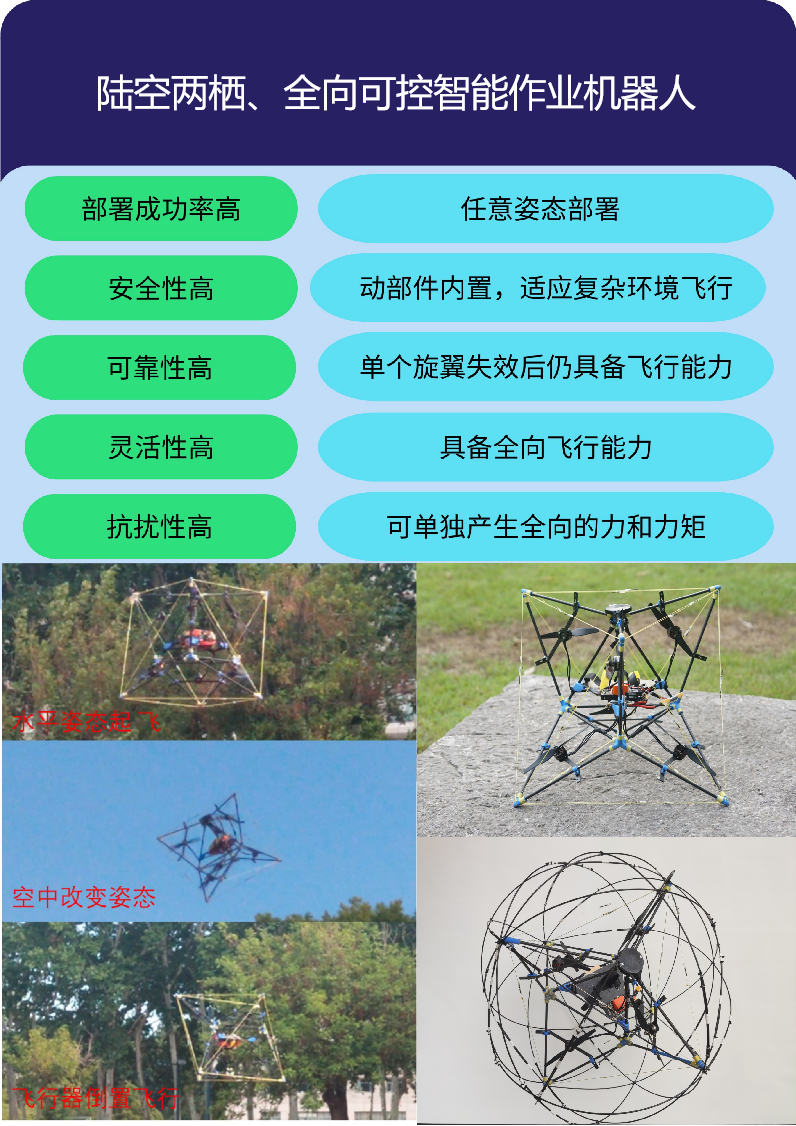
陆空两栖全向智能机器人的优点和创新点都很有前瞻性和实际应用价值。其主要的优点有:
1、部署成功率高:全驱动六旋翼结构可以以任意姿态起飞,能够很好的适应不同环境下的复杂环境;而传统欠驱动两栖机器人投放时需要部署到相对平坦的区域,且起飞时需要保证机身水平。
2、安全性高:陆空两栖智能机器人的桨叶均位于机身内部,在发生碰撞时可以避免对桨叶造成破坏。且外部高强度碳环不仅提高了机器人整体的结构强度,也提供了对机器人安全保障。
3、可靠性高:陆空两栖智能机器人的结构简单、强度高并且具备冗余动力;能够在单个旋翼失效后,作为“欠驱动飞行机器人”进行飞行作业。
4、灵活性高:机器人具备实现全向飞行能力,在与环境存在力交互的任务中更有优势,比如样品采集、设备维修等;并且该飞行器可以实现任意姿态悬停,可以为航拍提供一个稳定、多角度的飞行平台。
5、抗扰性高:陆空两栖智能机器人可以产生全向的力和力矩,当有侧风扰动时无需倾斜机身即可产生抵抗干扰的力和力矩。
作品创新点主要有:
1、陆空两栖智能机器人采用了六个旋翼异面排布的新构型,结构紧凑,驱动部件少,易于维修,结构刚性大,在飞行过程中引入的机械振动较少。
2、陆空共用一套动力系统实现全驱动,系统整体费重小。
3、针对陆空两栖智能机器人设计了一种新的控制结构,能够进行六个自由度全部独立可控,实现了全驱动特性,能够在各个飞行模式和飞行模态下稳定飞行。